„Vďaka výkonu počítačov, ktorý v posledných rokoch ohromne narástol, je stále bližšie deň, kedy autá budú vidieť svoje okolie rovnako ako človek a dokážu správne vyhodnocovať komplexné situácie v meste,“ poznamenal prof. Ralf Guido Herrtwich, vedúci asistenčných systémov pre vodiča a podvozkových systémov, výskumu koncernu a prípravného vývoja Daimler AG.
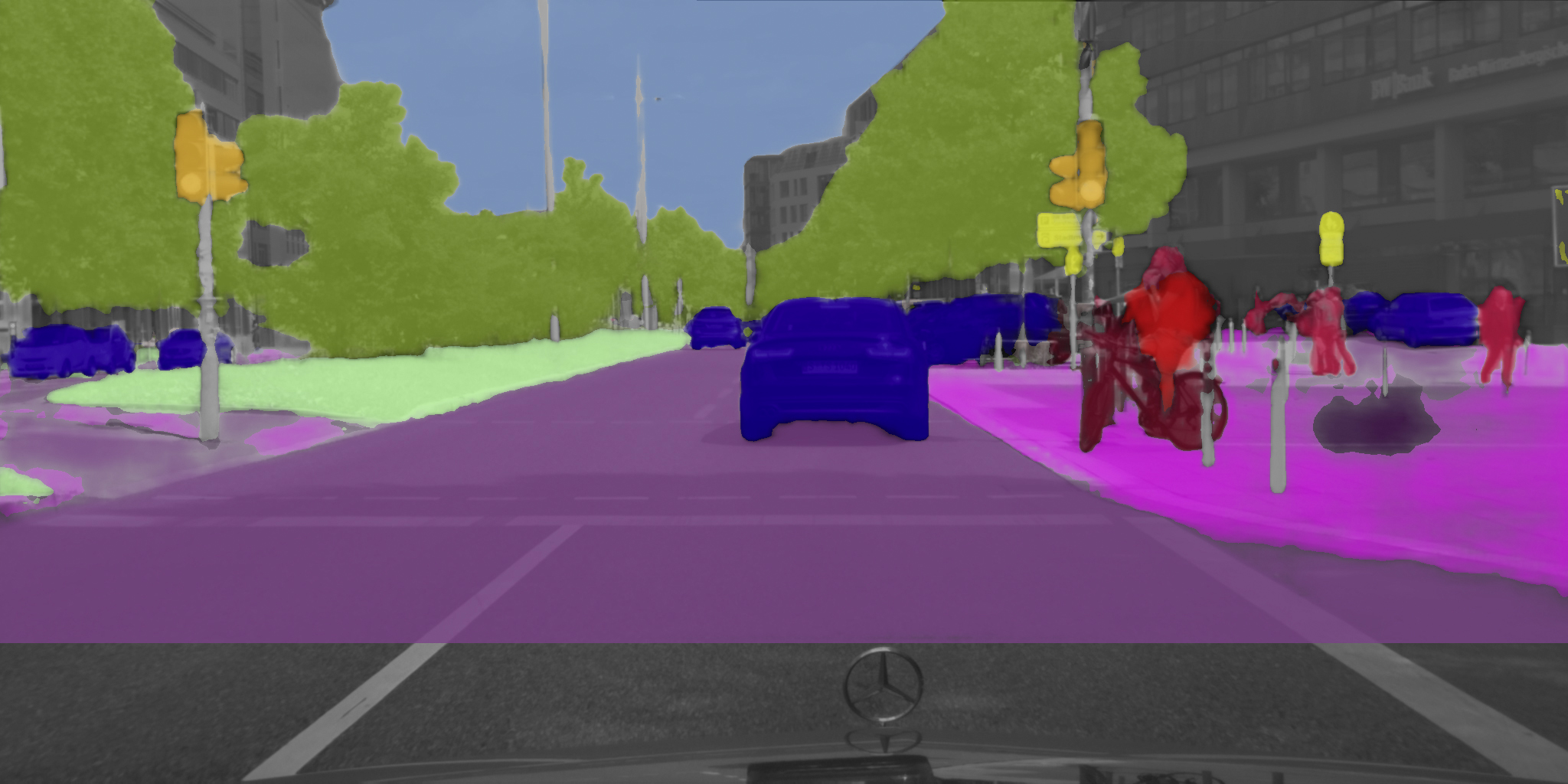
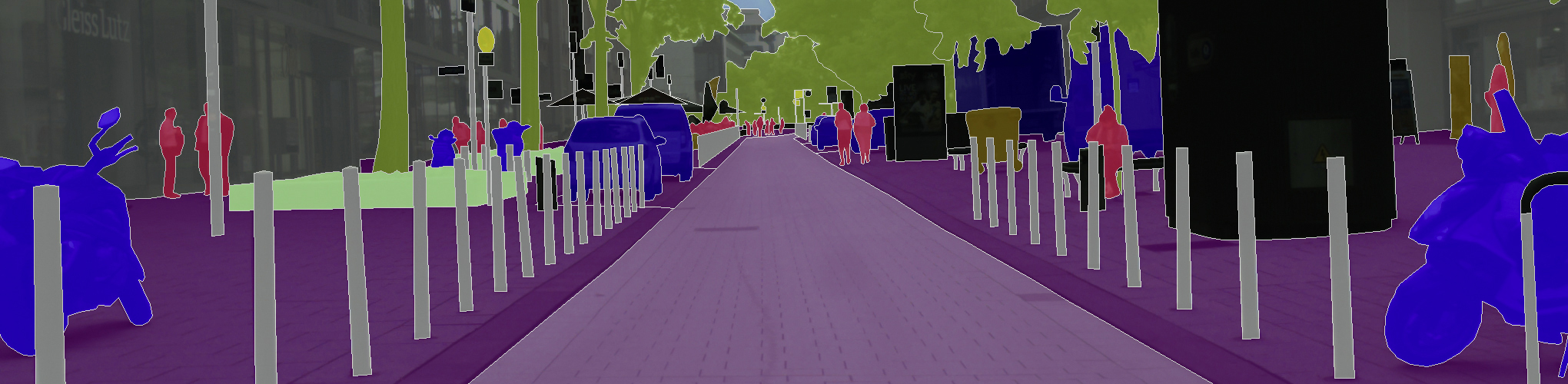
Systém na báze kamery pomocou takzvaného „štítkovania scén“ (scene labelling) automaticky klasifikuje neznáme situácie a rozpoznáva tak všetky objekty dôležité pre asistenčný systém – od cyklistu cez chodca až po vozíčkara. Vedci oddelenia „Snímanie okolia“ (Environment Sensing) cielene ukázali svojmu systému tisíce fotografií rozličných nemeckých miest, v ktorých manuálne podrobne označili 25 rozličných tried objektov ako vozidlá, cyklisti, chodci, cesta, chodník, budova, stĺpy alebo stromy. Na základe týchto príkladov sa systém naučil automaticky klasifikovať úplne neznáme obrazy a rozpoznávať tak všetky objekty dôležité pre asistenčný systém pre vodiča, a to aj pri značnom prekrytí a vo veľkých vzdialenostiach. Umožňujú to výkonné počítače, ktoré sú podobne ako ľudský mozog umelo neuronálne pospájané do siete, takzvané hlboké neurónové siete (Deep Neural Networks).


Systém tak funguje podobne ako ľudský zrak. Aj ten je založený na veľmi komplexnom neuronálnom systéme, ktorý informácie jednotlivých snímacích buniek na sietnici spája dovtedy, kým človek dokáže rozpoznať a rozlíšiť takmer neobmedzený počet objektov. Označovaním scén sa z kamery stáva namiesto čisto meracieho systému systém rozumejúci, tak všestranný ako súhra oka a mozgu. V záujme rýchleho napredovania Daimler spoločne s partnermi naďalej aktívne skúma automobily v zmysle vízie o beznehodovej jazde.
Budúce asistenčné funkcie bolo možné zažiť v testovacích vozidlách
Na záverečnom podujatí združeného výskumného projektu UR:BAN, teda „Mestský priestor: Asistenčné systémy a zosieťovaný manažment prispôsobený pre používateľa“ („Urbaner Raum: Benutzergerechte Assistenzsysteme und Netzmanagement“), vedci spoločnosti Daimler prostredníctvom piatich rozličných skúšobných vozidiel predviedli presvedčivé výsledky. Okrem prezentácie označovania scén v reálnom čase predviedlo ďalšie testovacie vozidlo radarové systémy vytvárajúce obraz a ich nové možnosti v mestskom prostredí. Bolo predvedené, že radarová senzorika dokáže medzičasom komplexne zaznamenať a zviditeľniť nielen všetky dynamické objekty, ale aj ľubovoľné statické prostredie.
Vďaka osobitným vlastnostiam radarovej vlny funguje toto riešenie aj v hmle a pri nepriaznivých poveternostných podmienkach. Okrem toho dokáže pomocou takzvaného mikrodopplera jednoznačne vyhodnotiť siluetu pohybujúcich sa chodcov a cyklistov. V hale výstavy tiež predstavili, ako tvoria údaje z radarov a kamier vďaka fúzii snímačov model okolia. Model zohľadňuje nielen miesta a rýchlosti rozličných účastníkov cestnej premávky, ale aj vlastnosti ako druh a posun objektov. Do modelu okolia vozidla vstupujú aj neúplné údaje snímačov a chýbajúce informácie, aké sa v reálnej premávke často vyskytujú.
V treťom skúšobnom vozidle bol zabudovaný systém na detekciu, klasifikáciu a rozpoznanie zámeru chodcov a cyklistov. Tento systém predvída na základe držania hlavy, postavenia tela a pozície na kraji cesty rovnako ako vodič, či chodec ostane stáť na chodníku alebo prejde cez cestu. Vďaka tomu možno v nebezpečnej situácii spustiť reakciu systému na zabránenie nehody až o 1 sekundu skôr ako u systémov, ktoré sú aktuálne na trhu.
Ďalej predviedli systémy na báze radaru a kamery, ktoré dokážu zvýšiť bezpečnosť a komfort pri zmene jazdného pruhu v mestskej premávke. Táto asistenčná funkcia umožňuje asistovaný prechod do vedľajšieho jazdného pruhu v rozsahu rýchlostí 30 až 60 km/h, ktorý vodič môže vyvolať pomocou ovládacieho prvku. Systém sníma okolie a premávku v jazdných pruhoch. Analýza situácie poskytne odhad vývoja scenára a následne povolí vypočítanú krivku dráhy.
Potom sa vykoná podporné vedenie vozidla v pozdĺžnom a priečnom smere s cieľom zmeny jazdného pruhu. Informáciu o tom, či systém môže alebo nemôže vykonať zamýšľanú zmenu jazdného pruhu, vodič intuitívne zistí v združenom prístroji. Po úspešne dokončenej zmene jazdného pruhu pokračuje pozdĺžna regulácia s funkciou udržiavania vozidla v jazdnom pruhu. Vodič má pritom kedykoľvek možnosť prevziať kontrolu nad systémom pohybom volantu, či zásahom plynového alebo brzdového pedálu.
Potenciál odhadu správania vodiča pre plánovanú zmenu jazdného pruhu, alebo odbočenie bolo možné zažiť v piatom skúšobnom vozidle. Pri nastávajúcej zmene jazdného pruhu sa napríklad údaje o pohľade vodiča ponad plece spoja so zosnímanými jazdnými parametrami. Očakávaný proces odbočenia možno predvídať na základe súhry pohybov volantom, zníženia rýchlosti a kartografických informácií. Systém počas prezentácie zakaždým automaticky zapol smerovku a zavčasu tak informoval okolie.
zdroj: tlačová správa